Systémes Multi Variables
Etats Multi Variables
Un système multi variable est décrit en fonction de son état, dépendant de ses « p » entrées « u » et de ses « q » sorties « y » mais aussi en fonction de son comportement dynamique interne.
Le plus petit ensemble, de « n » variables d’état {x1, x2 …xn}, à un instant t>0 (système causal), définit l’état du système (connu aussi pour T0=0). C’est un ordre « n »
Cet ensemble de « n » variables d’état {x1, x2 …xn} défini le vecteur d’état x(x1, x2 …xn)T, qui évolue dans un espace d’état, ce qui en constitue une modélisation.
Le plus petit ensemble, de « n » variables d’état {x1, x2 …xn}, à un instant t>0 (système causal), définit l’état du système (connu aussi pour T0=0). C’est un ordre « n »
Cet ensemble de « n » variables d’état {x1, x2 …xn} défini le vecteur d’état x(x1, x2 …xn)T, qui évolue dans un espace d’état, ce qui en constitue une modélisation.

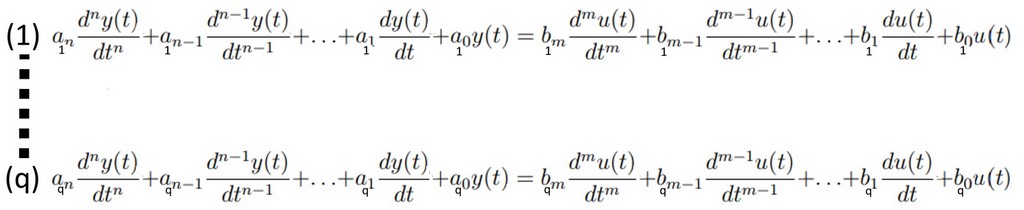
Equations différentielles Multi Variables
Un système de « q » variables de sorties avec « n » variables d’état possède un modèle mathématique basé sur un système de « q » équations différentielles de degré « n »:
Equations Matricielles Multi Variables
Le système d'équations peut s'écrire sous forme matricielle: A.Y = B.U, ou encore Y = (A-1.B).U ce qui met en évidence une matrice de transfert G = A-1.B

Modèle d'Etat Linéaire Invariant
Un modèle d’état, d’entrée « u » et de sortie « y », avec un état « x », linéaire et invariant (stationnaire), est représenté par un système à 2 équations ou des termes « A », « B », « C » et « D » sont des matrices d’état (Ann), de commande (Bnm), de sortie (Cpn) et de transmission (Dpm).

Schéma Bloc
La représentation synoptique du modèle d’état est alors le schéma bloc suivant, ou le bloc fonction [1/s] symbolise la dérivation d'ordre 1 :

Calcul du Temps Final
L’état du système est un résumé exhaustif du passé, et connaissant un temps initial (ti) on peut calculer l’état à un temps final (tf) grâce à l’intégration de l’équation d’état :
